

الجراحة الروبوتية
اقرأ أكثر
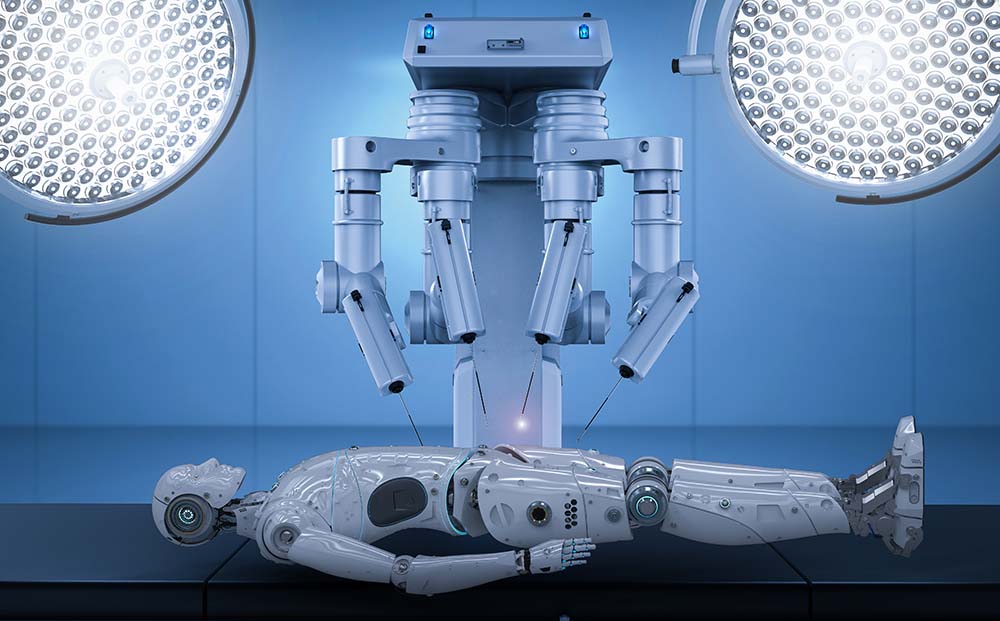
يتكون نظام Da Vinci من عربة المريض ("الروبوت") وعربة النظام ووحدة التحكم. تحتوي عربة المريض على أربعة أذرع متحركة ويتم وضعها على طاولة العمليات فوق المريض لإجراء العملية. يتم استخدام ذراع واحدة للتحكم في الكاميرا ثلاثية الأبعاد. يمكن ربط الأدوات المختلفة بالأذرع الثلاثة الأخرى.
كما هو الحال في الجراحة التقليدية بالمنظار ، يتم استخدام أكمام إدخال مقاس 5-12 مم (مبازل) ، والتي يتم إدخالها من خلال جدار بطن المريض. يتم ملء تجويف البطن أولاً بغاز ثاني أكسيد الكربون. يتم إدخال الأدوات الروبوتية المطورة خصيصًا من خلال المبازل ، والتي يتم تحريكها بمساعدة الأذرع الروبوتية.
يقوم المشغل بتحريك الأذرع الآلية وبالتالي يتحكم في الأدوات من وحدة التحكم. بمساعدة أحزمة اليد الخاصة ، يمكن إجراء الحركات بشكل حدسي ودقيق. ينظر الجراح في مناظير وحدة التحكم (على غرار المناظير العادية) ، حيث يمكنه متابعة حركاته في الوقت الفعلي في صورة ثلاثية الأبعاد عالية الدقة. يمكن استخدام الدواسات الموجودة في الجزء السفلي من وحدة التحكم لطمس الأوعية الدموية الصغيرة باستخدام تيار عالي التردد. بالإضافة إلى ذلك ، يمكن للجراح استخدامه للتبديل بين الأدوات الفردية والتحكم في الكاميرا بدقة حسب الحاجة.
لمزيد من المعلومات حول تكاليف ومزايا وإجراءات الجراحة الروبوتية في تركيا، يرجى النقر هنا >>
وفقًا للمادة 10 من قانون حماية البيانات الشخصية (KVKK) بعنوان التزام مراقب البيانات بالإفصاح ، نستخدم ملفات تعريف الارتباط وفقًا للتشريعات ، والتي تقتصر على الأغراض المحددة في سياسة الخصوصية.